I’ve reached point when provided performance information from brushless motor manufacturers started to seem incomplete and at times inaccurate.
There is plenty of ready to use kits and builds tested by thousands of people for small 450mm to around 900mm multirotor vehicles. Primary use of those is to put GoPro-like or small DSLR or mirrorless camera in the air. While it’s good, it is very limited application for such a versatile platform. I started to look around for some other builds and, more importantly, for tools to help build my own.
This is where problem started to bulge. All vehicles were build to particular task or to customer specification. Part selection process is not disclosed, motor and propeller combination was usually from same brand. Looking at performance data of those combinations I started to think that manufacturer does not show everything, and what is shown – is limited accuracy.
From other side for those of us with shallow pockets or hobbyists buying sets from Tiger or KDE Direct is not the first thing to do. We go with cheaper alternatives and this is where situation becomes awful – no useful data whatsoever!
In my mind measuring is the only option – I need thrust measurement station.
There are few available on many model aircraft related sites. Problems with them are:
- motor placed horizontally which is OK for planes but not good for multirotors;
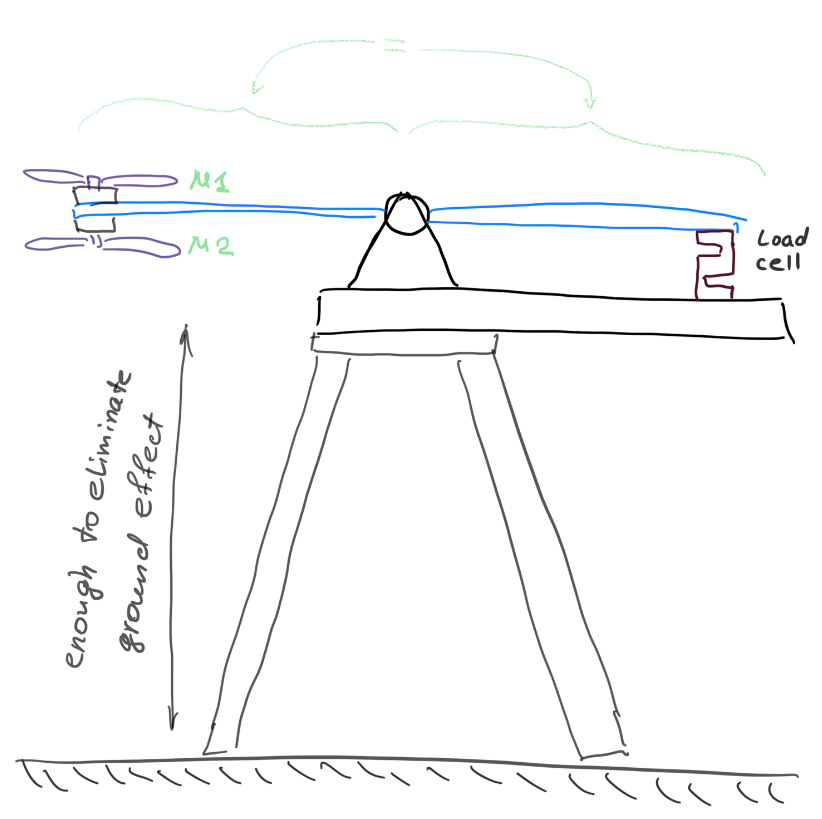
- motor is too close to table or whatever object station mounted to, it results into fair amount of deflections and increases thrust readings by up to 15%;
- stations are too small, designed for systems with up to 5kg of thrust at 100% throttle and up to 6S battery – suitable for 900mm type frames but not more;
- no coaxial configuration supported.
All that led to creating my own.
Station must meet the following specification:
- Support coaxial motor configuration to measure thrust and power from each motor separately.
- Motors and propellers position and direction is same as actual vehicle.
- Digitally controlled power supply with enough power.
- Throttle sweep.
- Voltage sweep.
- Automated measurement and recording for further processing.
- Mobility.
To achieve it Teensy board was selected, DSHOT protocol and BLHeli32 ESCs where telemetry can be read for voltage, current and RPM measurements.
By huge amount of luck was able to acquire old BK Precision 40V 30A digitally controlled power supply in local hardware “junk yard” and it made life so much easier.

I’m located at about 53 meters above sea level which is close to what most of Chinese motor manufactures are claiming their performance data was measured at. Also there is at least one manufacturer from Oregon state in USA. All their measurements are made at 1300 meters altitude and it should make some difference. This is the reason to make station mobile, means I should be able to take it up in the mountains to measure thrust there.

This station is good enough to measure 40xx motors with propellers up to 18 inches. Problem is that at times thrust generated is high enough to tip whole setup over. Other miss from engineering stand point that when motor is on the bottom pivot point in the center of rod appears high enough to out of stable state, station starts vibrating and destroyed itself once.
There will be new version in the future.